Class Meeting 07: Advanced Blockly II
Learning Goals
- You will learn about rotational angles and angle arithmetic and get some hands on practice
- You will build upon your existing knowledge on conditional statements (if, else if, else) in Blockly.
- You will think outside the box and build something fun (and defeat your classmates)
Lecture Overview
Here is a link to the presentation slides for today.
Today's Timeline
- 10:00-10:30: Exercise 1 if you didn't get to this last time else Exercise 2, 3, 4
- 10:30-11:00: Exercise 2, 3, 4 if you just finished exercise 1 else Exercise 5 and 6
- 11:00-11:20: Exercise 5 and 6 if you are done with 2, 3, 4
Programming Exercise #1: Getting the first joint pair to work together.
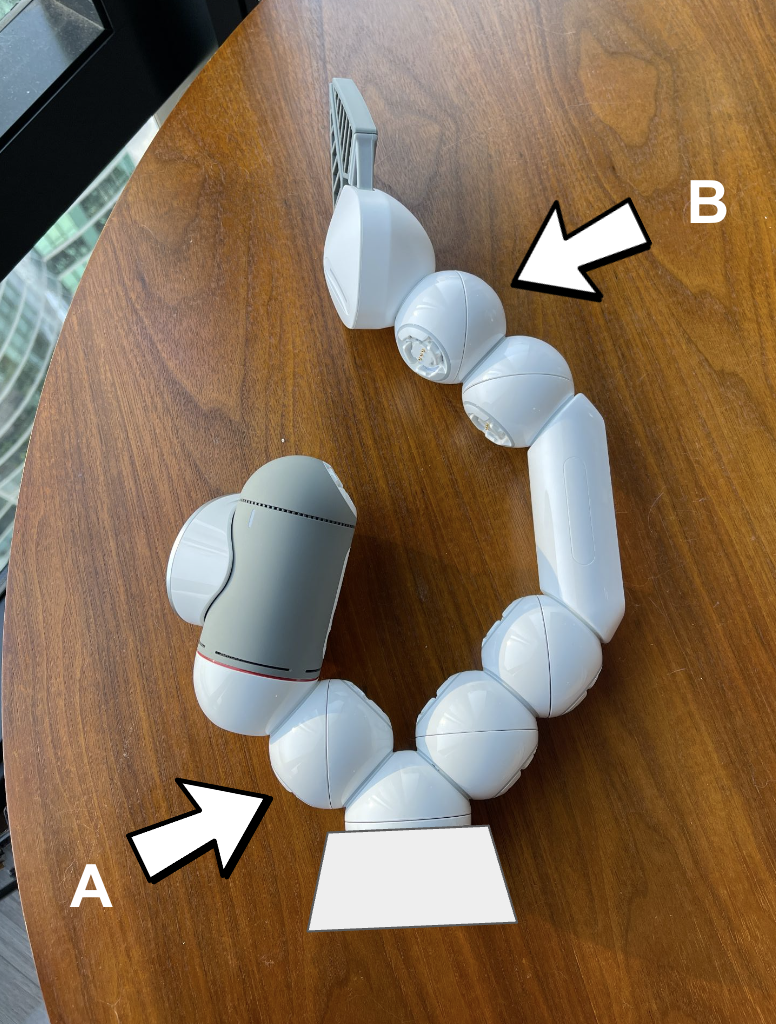
In this first exercise, get some hands on experience with measuring joint angles and using that measurement to move other joints. To begin, build a ClicBot that has 6 joints with the base, a long arm, a gripper, and a brain, as pictured below.

Then, create a new program that measures the angle of joint A (pictured). HINT: use the "detect servo angle" sensor in the sensors tab.
Once you're familiar with how the angle reading of joint A changes as you rotate the joint upon its axis, add additional logic to make joint B mimic the movements of joint A.
HINT 1: you can use constant offsets to account for the angle difference in which joint A and joint B start at.
HINT 2: is your logic correct but the program not doing anything? Maybe it is doing something really but just doing once, really quickly that you didn't notice. How do you get it to keep doing it?
Blocks you might need
- Sensors: Detect servo angle of joint
- Actuators: Joint No.X starts to move to
- Controls: Loop, Conditionals
- Misc: You'll probably need to use some blocks from Variables and Operators to make your conditional logic work!
This is what your finished product should do.

Programming Exercise #2: Please pair up with your neighbor and build a big robot
IMPORTANT: In order to ensure that everyone in the group has a chance to participate, please refer to the Group Assignment Sheet to see who is responsible for which task. Please check with an instructor when you're done with each task.
Please build the following robot as pictured below. Note: you will need to borrow your neighbor's joints to make this work.
This robot will require 9 joints, 1 long arm, 1 gripper, 1 brain, and 1 smart foot. Once you're settled in with your combined group, raise your hand and we will hand you a smart foot.


Programming Exercise #3: Program 3 of the Big Robot's joints
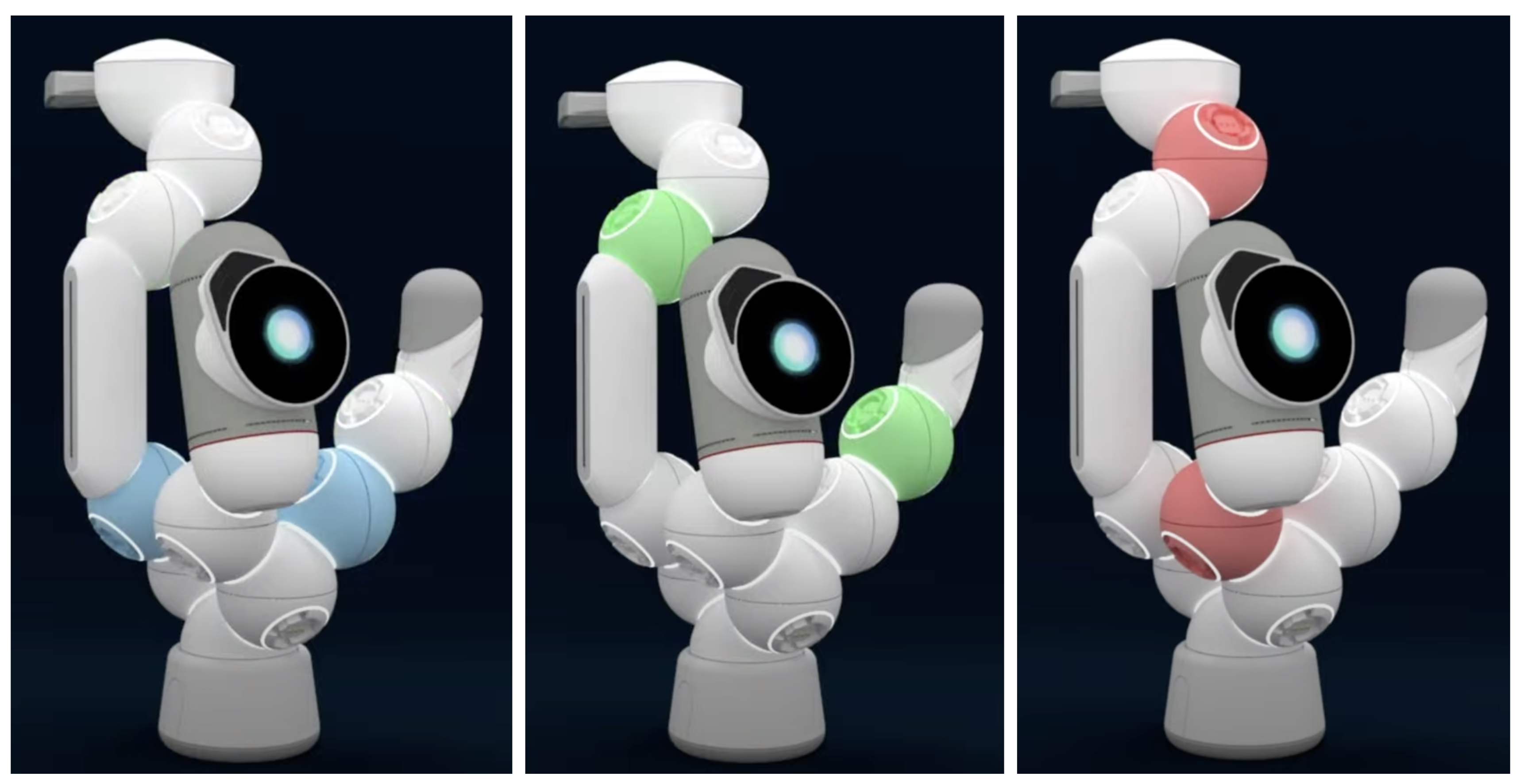
Please refer to the following diagrams for the correct joint pairing. Note that there are 2 vertically rotating joints and 1 horizontally rotating joint. The exercise is broken down into 3 parts, 3.1, 3.2, and 3.3. The individual assigned to each task must complete that task, discussion with the team is encouraged.
Subtasks:
- Blue joint pair
- Green joint pair.
- Red joint pair.
Here's a demo of what your end product should be able to do. Note: Your implementation doesn't have to be exactly the same, as long as it does something similar, you're good.

Blocks you might need
- Sensors: Detect servo angle of joint
- Actuators: Joint No.X starts to move to
- Controls: Loop, Conditionals
Programming Exercise #4: Program the Gripper & Smart Foot
You're nearly done! The last thing you'll need to program as a group is the gripper and the smart foot. Your program logic should aim to open/close the gripper based on pressure input on the smart foot. Note: the units of force used by the smart foot is Newton
Here's a demo of what your end product should be able to do. Note: Your implementation doesn't have to be exactly the same, as long as it does similar things, you're good.
.gif)
Blocks you might need
- Sensors: Detect servo angle of joint, Smart Foot No.X detected pressure
- Actuators: Joint No.X starts to move to, Grasp No.X release/grasp
- Controls: Loop, Conditionals
Programming Exercise #5: Optimizing Your Program and Powering Up Your Robot Build
Now that you're done with building and coding the Big Robot, take turns trying to pick up blocks and drop them into the Accessories box.
This is also a good opportunity to fine tune your program so that it behaves exactly like you want it to. You're also encouraged to modify the structural design of your robot by adding additional joints, grippers, etc. This will give you an edge in the competition you'll have against your neighbors in the next exercise. Winners will get prizes! Feel free to check out the rules in Exercise 6.

Programming Exercise #6: Battle of the ClicBots
Challenge your neighbors to a battle! Please ask your instructors who your team should battle against.
The objective of this game would be to score the most points by picking up blocks and placing them into your team's box. The different blocks are worth different number of points!
- PURPLE: 1
- GREEN: 2
- YELLOW: 3
- RED: 4
- ORANGE: 5
If you manage to decapitate your opponent's robot, your team will win by knockout!

Today's Exit Ticket
Here's a link to today's exit ticket survey. The exit ticket will ask you for:
- A screenshot of your Blockly code for Programming Exercise #1. You're expected to have successfully completed this exercise and submit your final code (via the screenshot).
- A video of your big robot in action after completion of Exercise 4 (video less than 30 seconds).